The researchers at the University of Bristol have created a robot that mimics the movement of a snail. This innovative robot, equipped with a sliding suction mechanism, can effortlessly slide on surfaces, even water, which serves as a substitute for snail mucus and acts as an adhesive.

The study, published on May 13 in Nature Communications introduces a novel method for robots to easily scale walls. This breakthrough has the potential to revolutionize the inspection of hard-to-reach surfaces such as wind turbine blades, ship hulls, aircraft, and skyscraper windows. The sliding suction mechanism could also be pivotal in various robotic applications, including industrial gripping, climbing, and transportation.
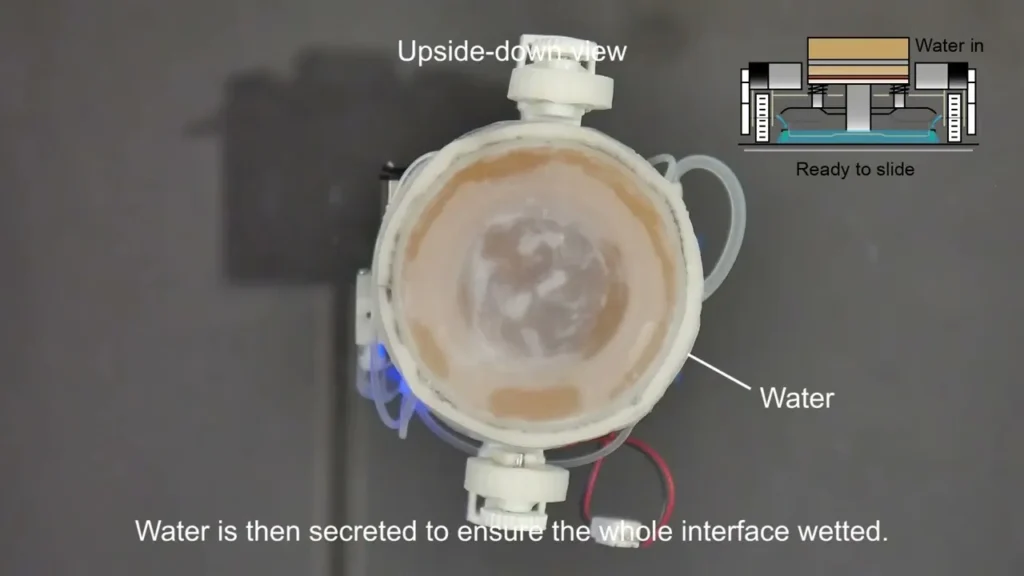
Snails are known for their stable adhesive sliding behaviour, even when carrying heavy loads like their shells. Inspired by this natural phenomenon, lead author Tianqi Yue and his team at the Bristol Robotics Laboratory developed a robot that replicates this ability. The robot uses water as a cost-effective, accessible, and clean substitute for snail mucus, facilitating its sliding motion while maintaining suction.
Yue explained, “People know that snails have a stable adhesive sliding behaviour, even though they are carrying a heavy payload, in this case a shell. Inspired by this, we presented a ‘sliding suction’ mechanism and developed a sliding suction robot, which achieved comparable sliding ability as snails.”
The research team optimized the materials of the suction cup and designed the robot’s mechatronic system. They demonstrated the robot’s practical applications, including carrying a 200g mass and navigating obstacles. Remarkably, the robot can handle a load ten times its weight, demonstrating high loaded sliding ability by carrying a 1kg mass.
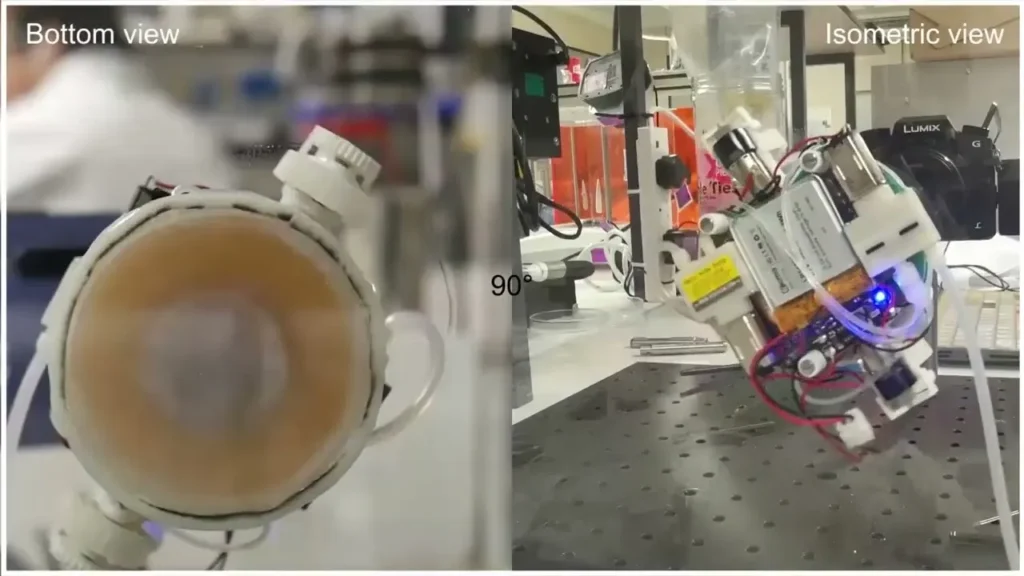
The sliding suction mechanism allows the lightweight robot to move vertically and upside down at high speeds, without requiring energy for static adhesion. This mechanism results in low energy consumption, high adhesion efficiency, and safety, along with high loading capacity and low complexity. Additionally, it only leaves behind a quick-to-evaporate water trail.
Yue highlighted the significance of their findings, stating, “Through the performance of sliding suction robot, we demonstrated that sliding suction offers low energy consumption, high adhesion efficiency and safety, high loading capacity and low complexity, while only leaving a quick-to-evaporate water trail. The most exciting finding of our research is that the proposed sliding suction mechanism is a novel clean climbing strategy and will significantly advance the development of the next-generation climbing robots.”