
A team of researchers from the Georgia Institute of Technology in the US sought to determine the optimal number of legs for robots designed to navigate challenging surfaces. Inspired by centipedes, they created a series of multi-legged robots to test their performance.
Understanding Centipede Movement
“When you see a scurrying centipede, you’re basically seeing an animal that inhabits a world that is very different than our world of movement,” explained Daniel Goldman, a Physics professor at Georgia Tech who led the research. He noted that human movement relies heavily on inertia, whereas centipedes must continuously move their limbs to keep going.

The Experiment: Building and Testing Robots
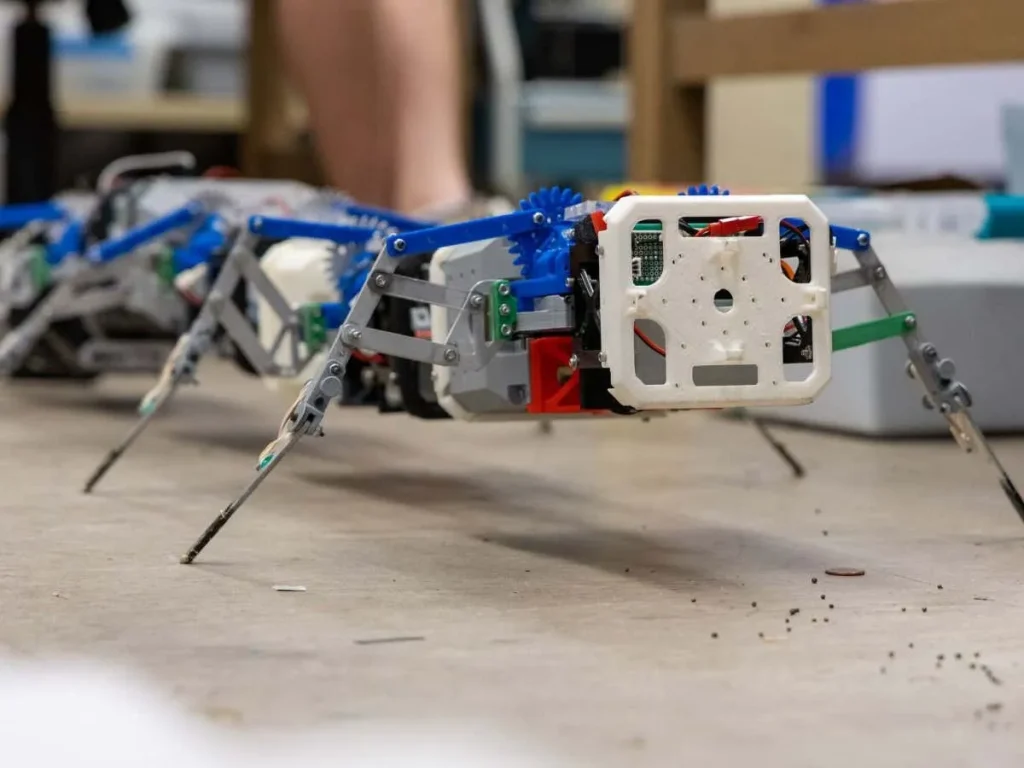
Researcher Baxi Chong and his team used a 3D printer to build robots with varying numbers of legs, ranging from 6 to 16. Each robot segment had two legs and multiple motors, but no sensors or cameras, mimicking the pre-programmed movement of real-life centipedes. The robots were tested on indoor and outdoor obstacle courses to evaluate their mobility.
Findings: More Legs Lead to Better Performance
The results showed that robots with fewer legs exhibited significant variations in travel time between two points. In contrast, robots with 14 and 16 legs consistently performed better and completed the courses faster. Mathematical analysis confirmed that robots with more than 10 legs could cover a 60cm distance more reliably than those with fewer legs.
Practical Applications and Future Testing
Daniel Goldman emphasized the reliability of multi-legged robots: “Many robots could probably make it from some point A to point B, but it’s hard to prove with certainty that they’ll do that without taking a ton of time. Here, when we increased the number of legs, we saw, and could even mathematically prove, that they’ll for sure make it.”
Baxi Chong added that more legs help break up the robot’s movement, reducing energy waste on difficult surfaces. The researchers believe these robots could be valuable in disaster relief, such as navigating earthquake debris, and agricultural monitoring, like detecting weeds. However, further testing is needed to refine the technology for these applications.
This innovative study from Georgia Tech showcases the potential of multi-legged robots to perform better on challenging terrains. By drawing inspiration from centipedes, the research team has paved the way for future advancements in robotics, potentially transforming disaster response and agricultural practices.